
























作品詳情
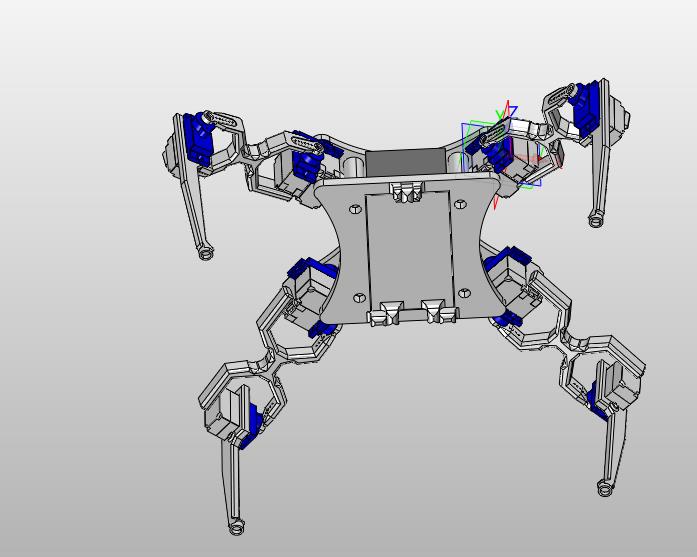
仿生蜘蛛型robot是一種高度模擬真實蜘蛛運動特性的機(jī)器人。它采用先進(jìn)的機(jī)械設(shè)計與控制技術(shù),實現(xiàn)了蜘蛛爬行、攀爬和空中跳躍等動作的精準(zhǔn)復(fù)制。其關(guān)鍵特點包括靈活的關(guān)節(jié)、強(qiáng)大的驅(qū)動力和高度適應(yīng)性,使其能夠在復(fù)雜環(huán)境中高效移動。通過優(yōu)化算法和智能控制系統(tǒng),該機(jī)器人展現(xiàn)出高度的自主導(dǎo)航和障礙跨越能力。此外,其節(jié)能設(shè)計和智能感知系統(tǒng)也增強(qiáng)了其實用性和可靠性。



平diy桌面級快速成型3D打印機(jī)")

電機(jī)4軸高精度自動化機(jī)械臂")


動臺袋子印畫設(shè)備")



")
床")

全面罩")
擠出頭加熱鋁塊黃銅打印頭噴嘴")


